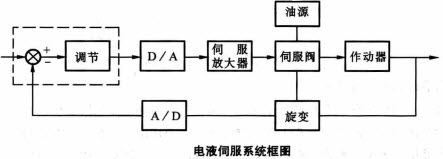
喷漆机器人具有6个自由度,每个自由度都由一套上图所示的电液伺服系统驱动。
电液伺服系统为多输入、多输出的变量系统,各系统之间具有负载效应,以适应机器人运动参数和动力参数的变化;各电液伺服系统的快速响应特性一致,使各个机构的运动相互协调,并具有较高的速度刚度,使操作机具有运动速度高、工作稳定性好、位置精度高等特点,以满足喷漆工艺的要求。
(填空题)
HRGP-1A喷漆机器人微机控制系统采用双CPU工作,其中主CPU为(),并配有协处理器,从CPU为(),主要用于电液伺服回路控制。
(填空题)
HRGP-1A喷漆机器人的主要特点是操作机采用()结构,具有3个自由度;驱动器采用(),减轻了示教力;位置测量采用()作传感器,具有较高的伺服精度。
(简答题)
简述HRGP-1A喷漆机器人的再现过程。
(简答题)
画图:伺服系统的一般组成
(名词解析)
电液伺服系统
(简答题)
简述电液伺服加载系统的工作原理
(简答题)
电液伺服阀必须满足的性能和要求?
(名词解析)
电液伺服阀
(简答题)
电液侍伺服阀的作用?

