(判断题)
根据作业任务要求的不同,机器人的控制方式又可分为点位控制、连续轨迹控制和力(力矩)控制。
(单选题)
通常对机器人进行示教编程时,要求最初程序点与最终程序点的位置(),可提高工作效率。
(判断题)
力的三要素是指:力的大小、力的方向和力的作用线。
(填空题)
力的平移定理和力的可传性原理只适用于()。
(简答题)
试分析步进电动机型怠速控制阀如何进行起动初始位置的设定?
(判断题)
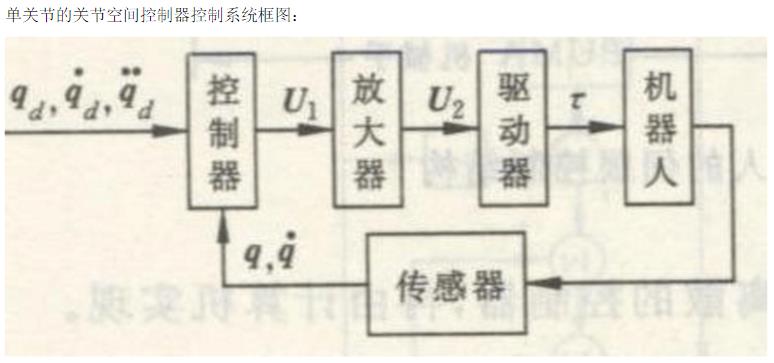
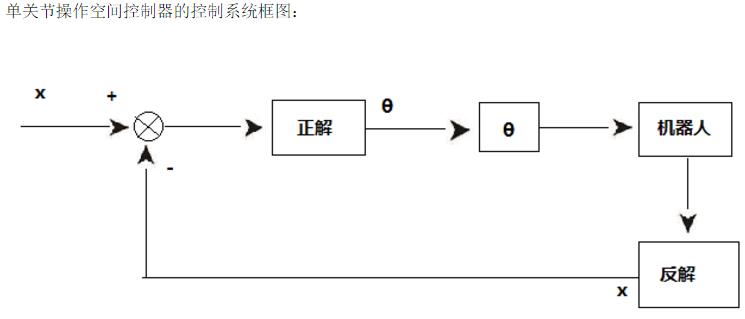
控制系统用来控制工业机器人按规定要求动作。
(多选题)
工业机器人按控制方式分,可分为()。
(简答题)
工业机器人控制方式有几种?
(判断题)
二力平衡公理、力的可传性原理和力的平移原理都只适用于刚体。

