(简答题)
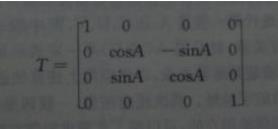
简述直角坐标系中图像旋转的过程。
答案解析
(判断题)
数控加工编程坐标系应与机床坐标系相重合。()
五坐标联动数控机床属于轮廓控制数控机床。()
数控机床坐标系原点随着环境的变化有可能会产生漂移。()
(多选题)
数控机床上数控编程加工坐标系选择原则是()。
数控机床按同事控制的坐标轴可划分为哪几种类型?并说明其可完成哪些类型零件的加工?
多坐标图形数控编程中,加工对象主要有()。
多坐标图形数控编程中,常用的刀具轨迹生成方法有()。
(单选题)
UG的()坐标系可以任意的进行移动和旋转。