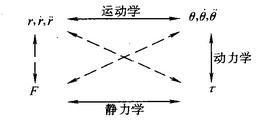
θ、关节加速度
θ,处理这种关系称为动力学(dynamics)。对于动力学来说,除了与连杆长度有关之外,还与各连杆的质量,绕质量中心的惯性矩,连杆的质量中心与关节轴的距离有关。运动学、静力学和动力学中各变量的关系如下图所示。图中用虚线表示的关系可通过实线关系的组合表示,这些也可作为动力学的问题来处理。
(简答题)
试论述互不溶系烧结的热力学原理。
(简答题)
试论述热力学基本方程dU=TdS-pdV的适用条件。
(填空题)
动力学是研究物体运动变化与()之间关系的科学。
(单选题)
动力学主要是研究机器人的()。
(单选题)
在平动、转动、振动运动对热力学函数的贡献中,下述关系式中哪一个是错误的? ()
(名词解析)
机器人动力学
(填空题)
常用的建立机器人动力学方程的方法有()和()。
(单选题)
动力学的研究内容是将机器人的()联系起来。
(单选题)
将作用于机器中所有驱动力、阻力、惯性力、重力都转化到等效构件上,求得的等效力矩和机构动态静力分析中求得的在等效构件上的平衡力矩,两者的关系应是()

