
(简答题)
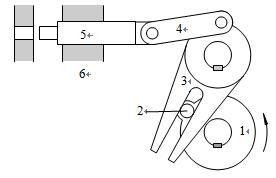
多杆机构如图所示。试分析:该机构由几个四杆机构组成(构件用1、2、……等数字标出)?各个四杆机构的名称? 
正确答案
该机构由两个四杆机构串联而成。其中前置机构1、2、3、6为摆动导杆机构,后置机构3、4、5、6为摆杆滑块机构,前置机构的运动输出件3同时是后置机构的运动输入件。

答案解析
略
相似试题
(简答题)
如图所示为齿轮——连杆机构,试分析: 1) 该机构自由度为多少?(要计算过程) 2)试用瞬心法求齿轮1与3的传动比ω1/ω3
(简答题)
如图所示机构,若取杆AB为原动件,试求:计算此机构自由度,并说明该机构是否具有确定的运动;分析组成此机构的基本杆组,并判断此机构的级别。
(简答题)
分析题:系统如图所示,试分析齿轮机构,传感器及丝杠螺母机构的误差对输出精度的影响.
(简答题)
如图所示三通零件在三个短V型块中定位,试分析该定位方案属几点定位?各V型块分别限制了哪几个自由度?
(简答题)
光电传感器控制电路如图所示,试分析电路工作原理:
(简答题)
光电传感器控制电路如图所示,试分析电路工作原理:
(简答题)
光电传感器控制电路如图所示,试分析电路工作原理:
(简答题)
光电传感器控制电路如图所示,试分析电路工作原理:
(简答题)
夹紧机构如图所示,试说明其工作原理。

